CONVOLUTIONAL NEURAL NETWORK(CNN)
The CNN is an
algorithm mainly designed to work on the images, where an image is internally
nothing but the set of pixel values, that is for example if you say you have a
color image of 48x48 size which internally means you have 6912(48x48x3=6912)
pixel values, where 3 indicates the RGB channels, Similarly, if you consider
the black and white image of size 48x48, then it means you have
2304(48x48x1=2304) pixel values in your image, where 1 indicates gray channel.

Image reference: https://en.wikipedia.org/wiki/Grayscale
WORKING OF CNN:
The CNN algorithm works in form of layers. Where the
most important layer is called the convolution layer. In this layer, we use a
concept called filters. The working of this layer is very simple that is, when
you consider an image in the training stage the algorithm tries to learn some
filters on the image, where filters are nothing but some feature values that
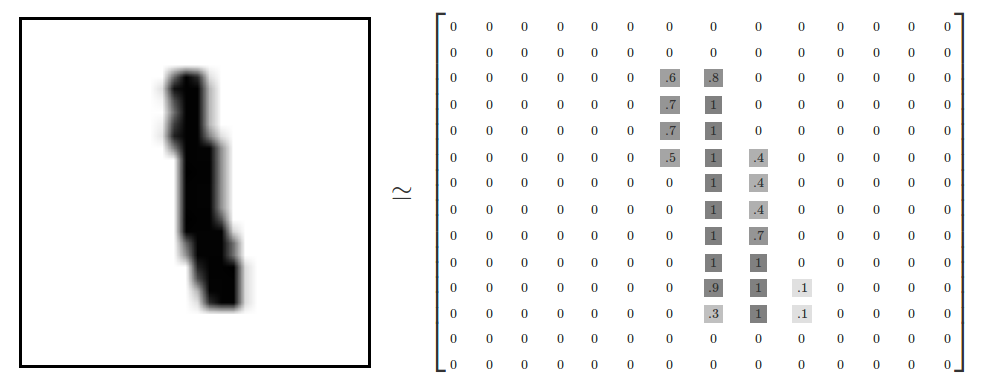
correspond to the prediction of the output. To understand that let’s see an
image example
Image reference:https://www.tensorflow.org/images/MNIST-Matrix.png
Here when you try to see the image on the left side that is a handwritten character 1, whereas when you see the right side you can see the grayscale pixel values for the image. Where we can see that except for the place where the value 1 is present, remaining all are zeros.
In this, we can
represent any image in the form of pixel values. Note, here the image is
grayscale so it has pixel values in 1-D. If it is a color image, then it is
going to have in a 3-D array (where one array for R, one for G, one for B).
Similarly, a filter is also
nothing but a collection of values in a matrix

Image reference: https://medium.com/@RaghavPrabhu/understanding-of-convolutional-neural-network-cnn-deep-learning-99760835f148
Coming to how the filters are useful, they are used to identify a certain feature in the test data or the test image. The entire process will be like this

CONVOLUTION LAYER:
Now let’s see how filters internally work. Let's try to see in the steps
- First, the filter is placed on the image
- Now we multiply each value in the filter with each corresponding value of the image.
- Now we add up all the values that we got in the previous step and fill them in the corresponding
- position in the resultant matrix.

·
Similarly, we will move the filter based on the stride given or
the required stride

{kind=link}
{kind=link}
Stride:
Stride
is nothing but the movement of filters, here when you try to see the filter is
moving one position left and then later one position down. Because by default
stride is set to 1. If you want to have two positions left and two positions
down then we will change stride to 2.

{kind=link}
Then there is another term that we need to discuss which is padding. In the above images when we are applying convolution or filters, we can see that we are losing some information in the output that is when we are taking a 6x6 image and applying a 2x2 kernel, the output is a 3x3 matrix or image. This means we are losing some information. Then there arrives a question “how to prevent this data loss?”
There
is one more key point here that we need to consider regarding padding, that is
when we are applying a filter over the image, we can see that the edge values
are getting covered under the filter only once, whereas the remaining
values are getting covered more than once. This may cause a loss of information
that is present on the edges. We can see this in the above images where we
discussed stride. This issue can also be solved by padding.

Padding
is nothing but adding some extra layers over the image to prevent the image
from data loss. We will add padding over the data based on our requirement,
that is if padding is kept as 1 which means we are going to add a row of 0's or
-1's at the top, bottom, left, and right of the image matrix.

{kind=link}
POOLING LAYER:
Now we
have to see one more layer which is the max-pooling layer. The main use of the
max-pooling layer is to reduce the image size. This is used to reduce the heavy
computation for the processor.
There
are two types of max pooling techniques:
- Max pooling
- Average pooling
Max
pooling:
It is
a technique where a filter is applied to the image and the maximum value within
the filter is taken as a new value in the corresponding output cell.
Average
pooling:
It is a technique where a filter is applied to the
image and the average value of all the elements within the filter is taken as a
new value in the corresponding output cell.

{kind=link}
Now we need to learn about one small thing called the activation function.
The
activation functions are those which are used to simplify the output that comes
after applying the convolution layer. There are many activation functions among
them the most famous function that we are going to use in the paper is relu.
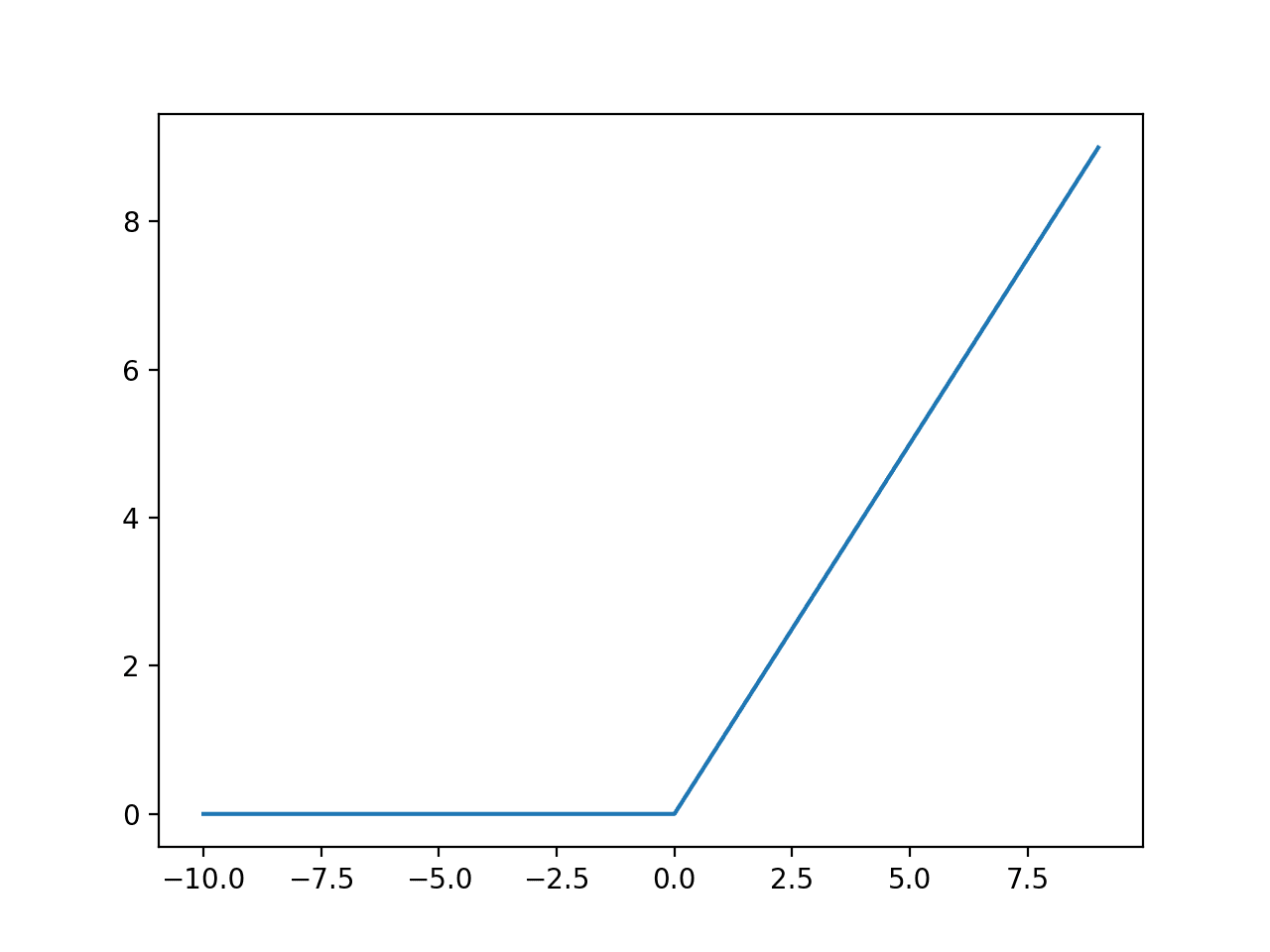
RELU:
The
working of the relu function is so simple. The function result is 0 for all the
negative values and the absolute value for all the positive values.

Image reference: https://machinelearningmastery.com/wp-content/uploads/2018/10/Line-Plot-of-Rectified-Linear-Activation-for-Negative-and-Positive-Inputs.png
{kind=link}

Image reference:
https://pylessons.com/media/Tutorials/Tensorflow-Keras-tutorials/CNN-tutorial-introduction/Figure_11.jpg
FLATTEN LAYER:
Here
all the data from the different feature maps are converted into a single one-
dimensional array and then passed to a fully connected network or dense
network.

Image reference:
https://sds-platform-private.s3-us-east-2.amazonaws.com/uploads/73_blog_image_1.png
{kind=link}
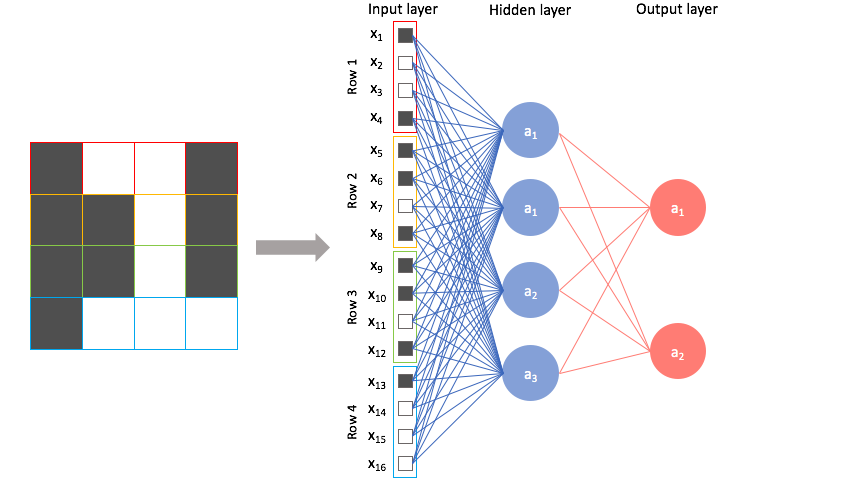
FULLY CONNECTED OR DENSE LAYER:
In this, we will use a fully connected neural network with each layer consisting of the required number of neurons. And we will pass the flattened array as input to the first neuron layer. And we will have n number of neuron layers based on the requirement. Where each layer consists of user-specified neurons. The neurons in the output layer must be equal to the number of output classes that you want. Where each neuron in the output layer corresponds to each class. This is called a fully connected layer because all neurons of one layer are connected to all neurons of the next layer. The main task here is to find the weights on the neuron links.

Image reference: https://www.jeremyjordan.me/content/images/2017/07/Screen-Shot-2017-07-27-at-12.07.11-AM.png
{kind=link}
IMPLEMENTATION PART:
Dataset:
The dataset is collected from the Kaggle website. This
dataset consists of lung X-ray images of patients. The dataset consists of 5216
training images, out of which 1341 are no Pneumonia affected people X-ray
scans, and 3875 are scans of people having Pneumonia. And the test dataset
consists of 234 normal people scans and 390 scans of Pneumonia affected
people. The size of each image is considered 224X224X3. The dataset credit
goes to
https://www.kaggle.com/datasets/paultimothymooney/chest-xray-pneumonia


RESULTS:
While coming to the application part we are considering a total of 5216 lung X-ray scans and out of 1341 are normal people scans and 3875 are scans of the Pneumonia affected people. The data may be slightly unbalanced, but it's just fine for image data like this. Here we are much concentrated on disease prediction.

The image size that we are considering is 224x224 and
with an RGB channel.

The CNN architecture that we initially used is

With the
above architecture when the model is tried it yielded approximately 74% after
10 epochs (10 rounds in simple terms).

Now we
will try to change the architecture and try to see the same thing with a
different view. This architecture that we have used is similar to VGG-16
architecture(A pre-trained model by google).


Here we have a good point to learn that even the change of architecture, sometimes can't yield good accuracy. In the above image, you can see that even when we used the similar architecture of VGG-16 it doesn't yield good accuracy. And we can see that there is a drop in accuracy by almost 50%. From this the main finding is there is no hard and fast rule for producing accuracy, it is just a trial and error process.
CONCLUSION:
While coming to traditional CNN the architecture is flexible, that is there is no fixed rule for the number or type, or order of layers and even there is no hard and fast rule for the number of kernels, size of kernels, or several neurons in dense layer. The only way to pick a model is by applying all layers by trial and error method and picking a model that betters generates high accuracy and satisfies the requirements.
Comments
Post a Comment